
About Me
Robotics Engineer
I'm a PhD candidate in Robotics at Rensselaer Polytechnic Institute, advised by Dr. John Wen.
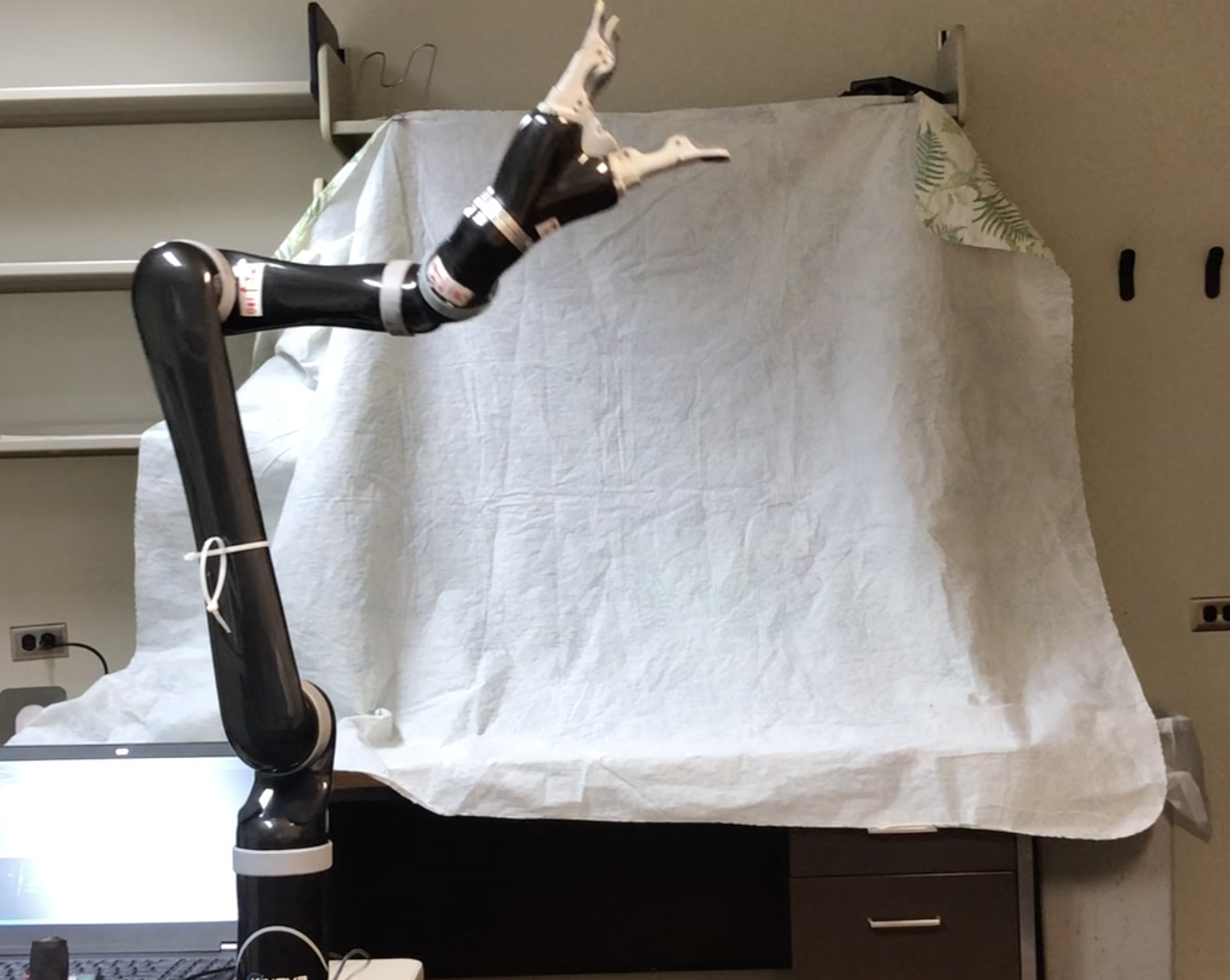
My research interests encompass motion optimization and kinematic calibration for robot arms within manufacturing contexts. My research incorporates concepts from robotics, optimization, and control. Additionally, I have experience in semi-autonomous vehicles for search and exploration, utilizing SLAM, deep learning, and reinforcement learning methodologies.
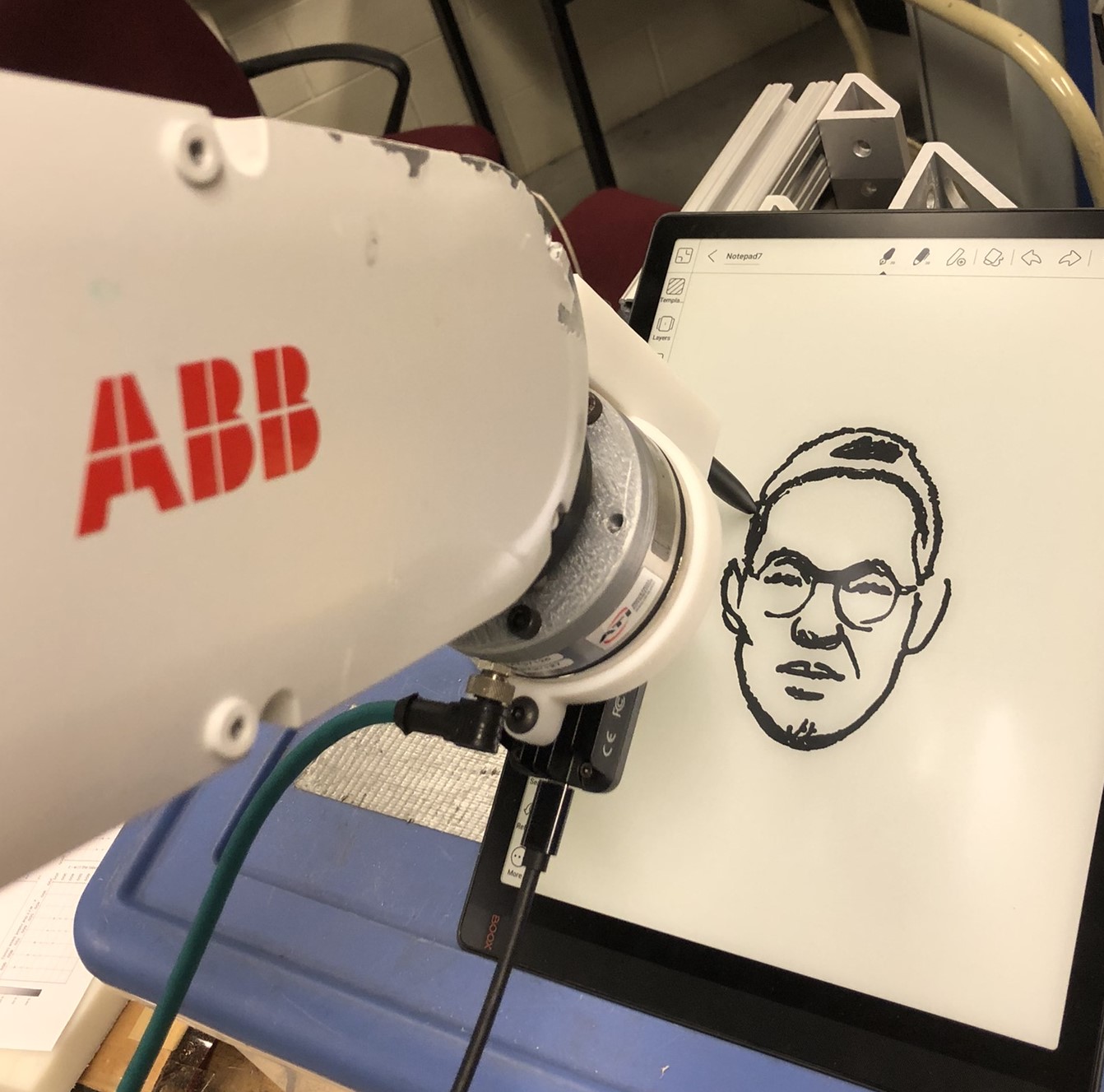
Robotics Manufacturing
Kinematic Calibration
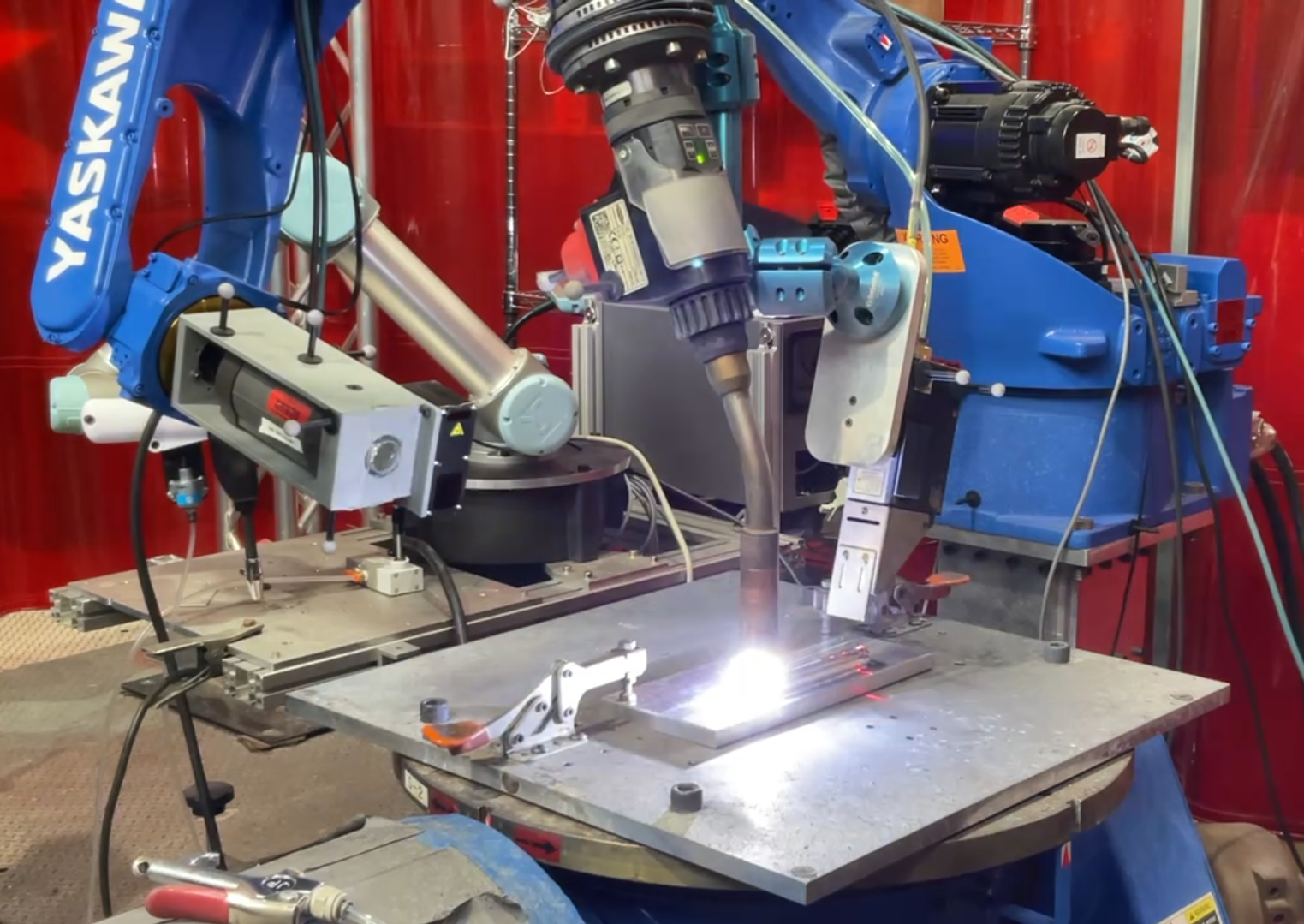
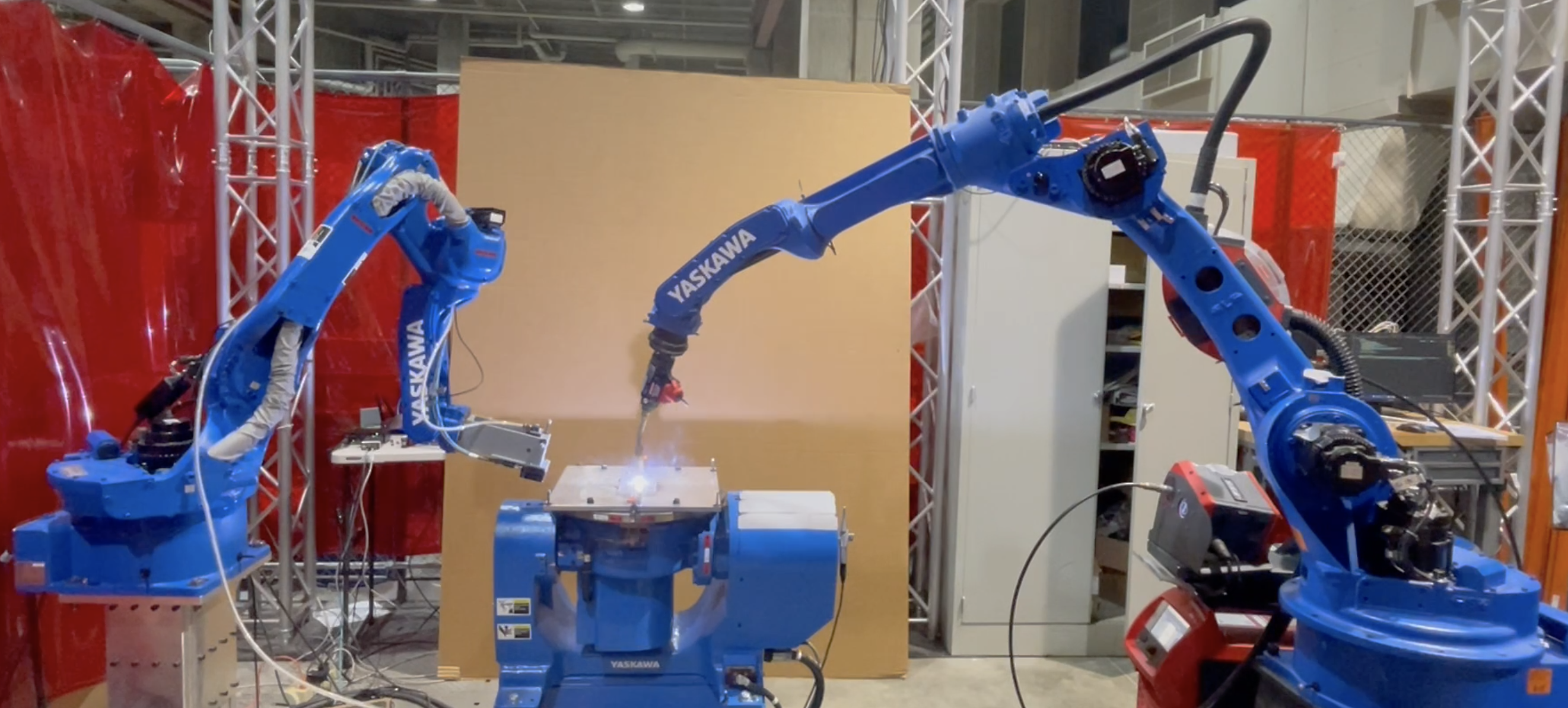
Data-driven WAAM
Research Projects


Contact Me
luc5@rpi.edu
Location
Rensselaer Polytechnic Institute, Troy, NY
Availability
I check my email daily and respond promptly to inquiries.