Abstract
Accurate robot kinematics is critical for precise tool placement using joint control of an articulated robot. Traditional kinematics calibration using Denavit-Hartenberg parameters is sensitive to joint-axis directions. Product-of- Exponentials (POE) parameterization is more robust but is non- minimal. Robot kinematics is also affected by the pose of the robot in different parts of the workspace due to joint tolerance, especially for massive payloads. This paper compares multiple POE-based kinematics calibration methods. We propose a configuration-dependent parameterization which is shown to have the best overall performance. In addition, for a traditional 6-DoF elbow manipulator, the configuration dependency is mostly on the shoulder and elbow angles. We show that the configuration dependence of the kinematics parameters may be adequately captured by these two angles.
Project Video
Results
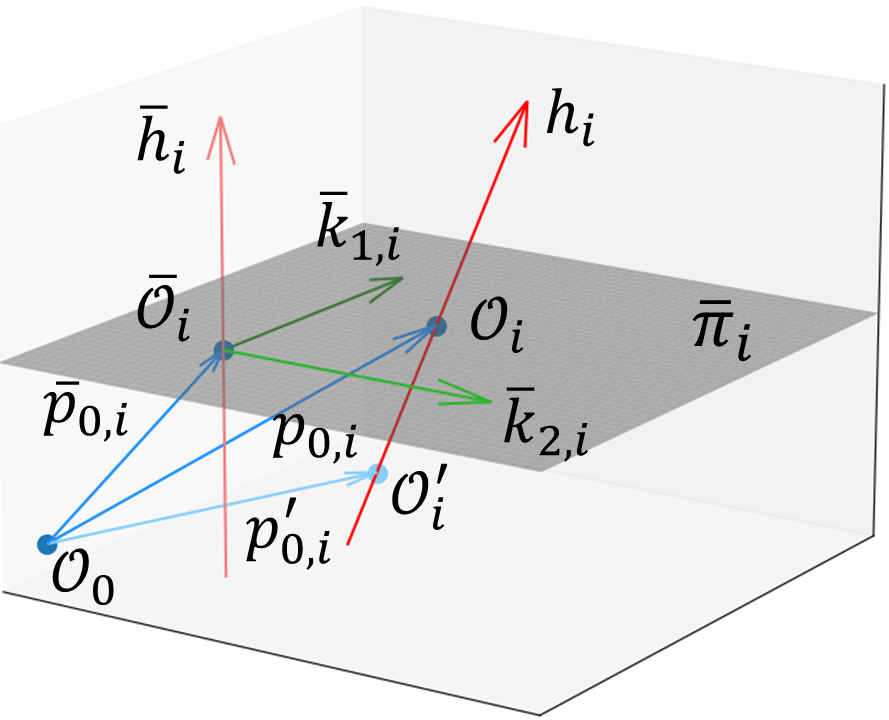
Minimal POE parameterization based on a set of nominal POE parameters.
Minimal POE Parameterization
Traditional POE is smooth but redundant. A minimal POE parameterization is proposed to reduce redundacy for better model interpolation while maintaining parameterization smoothness.
Fourier, NN, AE interpolation
I compared three methods to model the configuration-dependent POE parameters: Fourier basis, neural networks, and autoencoders. The Fourier has a comparable accuracy as NN while keeping training efficiency. The autoencoder learns a good low dimensional representation without prior knowledge.
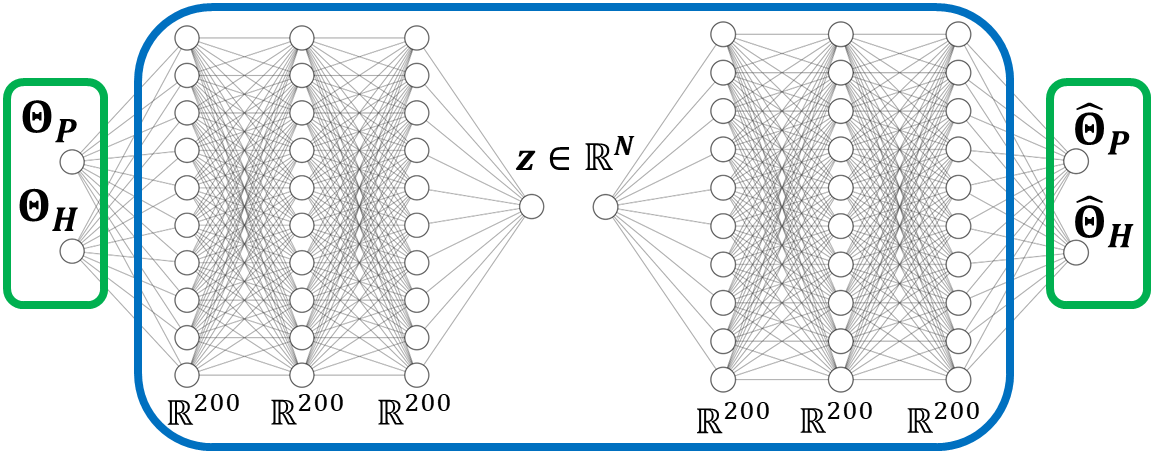
Autoencoder structure for configuration-dependent interpolation.
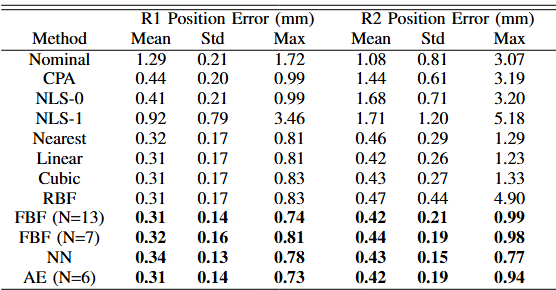
The proposed configuration-dependent calibration with FBF, NN, AE achieve the best accuracy with sub-millimeter level of precision.